ARUWPMarker Options in HoloLensARToolKit v0.1
14 Feb 2017This post is part of documentation of HoloLensARToolKit, version v0.1.
ARUWPMarker
ARUWPMarker.cs is one of the main scripts used in HoloLensARToolKit. In this post, the options of this script are listed and discussed, along with common usecases.
In Unity project using HoloLensARToolKit package, each actual marker must have one corresponding ARUWPMarker script.
ARUWPMarker is very similar to ARMarker in ARToolKit. However, because currently HoloLensARToolKit does not support NFT (Natural Feature Marker) of ARToolKit, that part of attributes are not included in ARUWPMarker.
When ARUWPMarker script is attached to some Unity GameObject, its inspector window looks like this:
and the inspector behavior of ARUWPMarker.cs is controlled by ARUWPMarkerEditor.cs located at Assets/Editor/.
Type
This field configures the type of the current marker. Available options are: single, single_barcode, single_buffer, and multi.
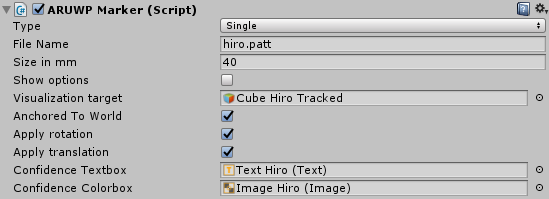
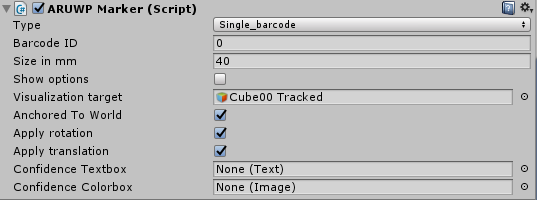
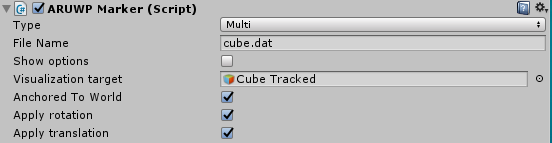
single: single pattern marker, e.g. Hiro marker and Kanji marker. Ifsingleis selected, then the fieldFile Namewill appear. Root path of file name isAssets/StreamingAssets/.single_barcode: single barcode marker (as known as single matrix marker). If it is selected, then the fieldBarcode IDwill appear.single_buffer: single pattern marker, but directly specified by a byte buffer. It should be set at runtime using functionARUWPMarker::setSingleBufferBuffer.multi: multi marker consists of multiple barcode marker. If it is selected, then the fieldFile Namewill appear to ask for the configuration file. Root path of the configuration file isAssets/StreamingAssets/as well.
Size in mm
You need to specify the size of the marker (outer border), when single or single_barcode marker is used.
Show Options
If it is checked, filtering options of marker tracking can be configured, including: Continuous Pose Estimation and Confidence Cutoff. Please refer to ARToolKit documentation for details about filtering.
Visualization Target
Marker pose provided by the algorithm contains position and orientation. This information should be applied to some object in the scene so that augmented reality experience is created. This field controls the target GameObject that receives the pose of marker.
Anchored to World
HoloLens is constantly localizing itself in the room.
The default augmented reality experience of HoloLens is creating an AR scenario within the room, and let the user explore it. Therefore, HoloLensARToolKit package takes advantage of its localization algorithm, to make the virtual object appear in the world coordinate system. The benefit of doing it is that, when the marker is occluded, it stays at the same position in the room. It is desired when the line-of-sight of the HoloLens camera is blocked, but the tracked object is not moving in the environment.
If this field is not checked, then all the pose update is achieved in the camera coordinate system. The virtual object stays at the same pose with respect to the camera, when the tracking is lost.
Apply Rotation
Whether rotation of tracked marker should be applied to the Visualization Target.
Apply Translation
Whether translation (position) of tracked marker should be applied to the Visualization Target.
Confidence Textbox and Confidence Colorbox
If the marker type is single, single_barcode or single_buffer, then ARToolKitUWP provides a score representing the confidence of tracking, ranging from 0 to 1. The score could be visualized in a textbox (Unity::UI::Text object) and in a colorbox (Unity::UI::Image object).
Examples
Hiro Marker
Matrix Marker (Number 0)
Cube Marker
Finally
You can access more articles describing the implementation details of HoloLensARToolKit in my blog, simply clicking on the tag:
Thanks for reading!