ARUWPController Options in HoloLensARToolKit v0.2
15 May 2017This post is part of documentation of HoloLensARToolKit, version v0.2. The ARUWPController options documentation for v0.1 is here.
ARUWPController
ARUWPController.cs is one of the main scripts used in HoloLensARToolKit. In this post, the options of this script are listed and discussed, along with common usecases.
Each Unity project using HoloLensARToolKit package must and must only have one ARUWPController component.
ARUWPController is very similar to ARController in ARToolKit, one of the major difference is that ARUWPController targets only at Universal Windows Platform, while ARController also handles Android, iOS, standalone and even editor. Therefore, ARUWPController has fewer attributes than ARController in general.
When ARUWPController script is attached to some Unity GameObject, its inspector window looks like this:
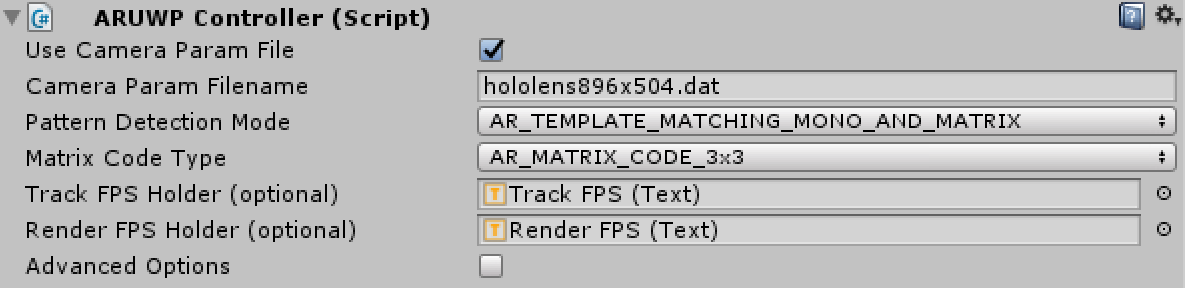
Use Camera Param
- The checkbox to indicate how to initialize the camera parameters
- If this box is check, then the field Camera Param Filename will appear. If not, then users must manually initialize the camera parameter via setting a byte buffer, by calling
ARUWPController.SetCameraParamBuffer()
Camera Param Filename
- This field specifies the name of camera calibration file, contained in the path
Assets/StreamingAssets/. - The camera calibration file must be ARToolKit format. It is a binary file, instead of XML or YAML for OpenCV. Please refer to HoloLens Camera Calibration project for more details.
Pattern Detection Mode
This field configures what kind of marker does the detection algorithm look for.
- If pattern markers only, e.g. Hiro or Kanji, then
AR_TEMPLATE_MATCHING_COLORorAR_TEMPLATE_MATCHING_MONOis enough. - If matrix marker only, e.g. 3x3 code marker, then
AR_MATRIX_CODE_DETECTIONis sufficient. - If there is need to detect both kinds of marker, then
AR_TEMPLATE_MATCHING_COLOR_AND_MATRIXprAR_TEMPLATE_MATCHING_MONO_AND_MATRIXmust be chosen.
Matrix Code Type
This field will appear if the Pattern Detection Mode involves the detection of matrix marker. There are many types of matrix marker, some of them are supported by ARToolKit and this project. The most common marker set is AR_MATRIX_CODE_3x3. All available options are:
AR_MATRIX_CODE_3x3AR_MATRIX_CODE_3x3_PARITY65AR_MATRIX_CODE_3x3_HAMMING63AR_MATRIX_CODE_4x4AR_MATRIX_CODE_4x4_BCH_13_9_3AR_MATRIX_CODE_4x4_BCH_13_5_5
Track FPS Holder (optional)
This field is looking for a Unity.UI.Text object to print out tracking frame rate. It is very useful for debugging, or inspecting the performance of the application. In the sample scenes provided by HoloLensARToolKit, this text field is at the top-right corner for the user. Because it is not a required component for tracking to run, this field can be left blank.
Render FPS Holder (optional)
Similar to Track FPS Holder (optional), this field is optional, and is able to visualize the frame rate of rendering of the application. The rendering here means the refreshing of the whole application, but not the refreshing of video.
Advanced Options
The above options are essential, and should be taken care for each application. If Advanced Options is checked, more options will be listed for users to configure the performance of ARUWPController. The following screenshot shows the full list of options:
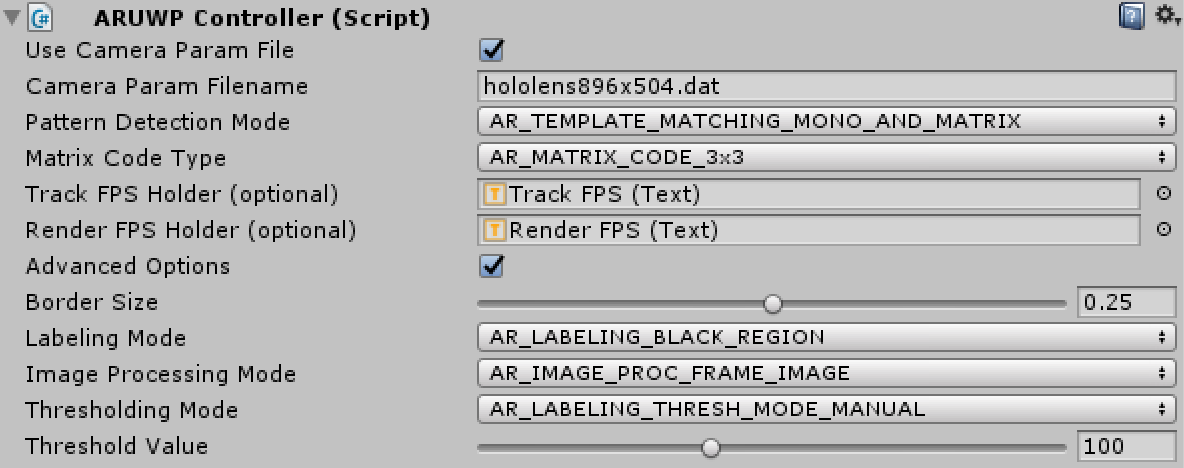
Border Size
The percentage of border of the marker, by default, it is 0.25. For example, in a 80cm width marker, the border is 20cm (25%).
Labeling Mode
It configures the color of the border of the marker. AR_LABELING_BLACK_REGION is the default.
Image Proc Mode
The mode of image processing, by default, AR_IMAGE_PROC_FRAME_IMAGE is chosen.
According to ARToolKit documentation,
When the mode is
AR_IMAGE_PROC_FIELD_IMAGE, ARToolKit processes pixels in only every second pixel row and column. This is useful both for handling images from interlaced video sources (where alternate lines are assembled from alternate fields and thus have one field time-difference, resulting in a “comb” effect) such as Digital Video cameras.
Thresholding Mode
You can choose different thresholding algorithm from the droplist, same as ARToolKit. Available options are:
AR_LABELING_THRESH_MODE_MANUALAR_LABELING_THRESH_MODE_AUTO_MEDIANAR_LABELING_THRESH_MODE_AUTO_OTSUAR_LABELING_THRESH_MODE_AUTO_ADAPTIVEAR_LABELING_THRESH_MODE_AUTO_BRACKETING
Threshold
This field appears when the Thresholding Mode is set to AR_LABELING_THRESH_MODE_MANUAL. ARToolKit first thresholds the grayscale image before corner extraction. It is easy to understand that the value applied here will be used as the threshold to obtain black and white image.
Finally
You can access more articles describing the implementation details of HoloLensARToolKit in my blog, simply clicking on the tag:
Thanks for reading!
